Matlab的PID模块C语言版本
PID模块(by:睿智的嵌入式(WiseMCU))
模仿Matlab的PID写的C语言版
PID控制模块无须额外配置直接使用
DEMO使用说明
获取PID控制器参数
打开Matlab的Simulink创建一个PID系统仿真

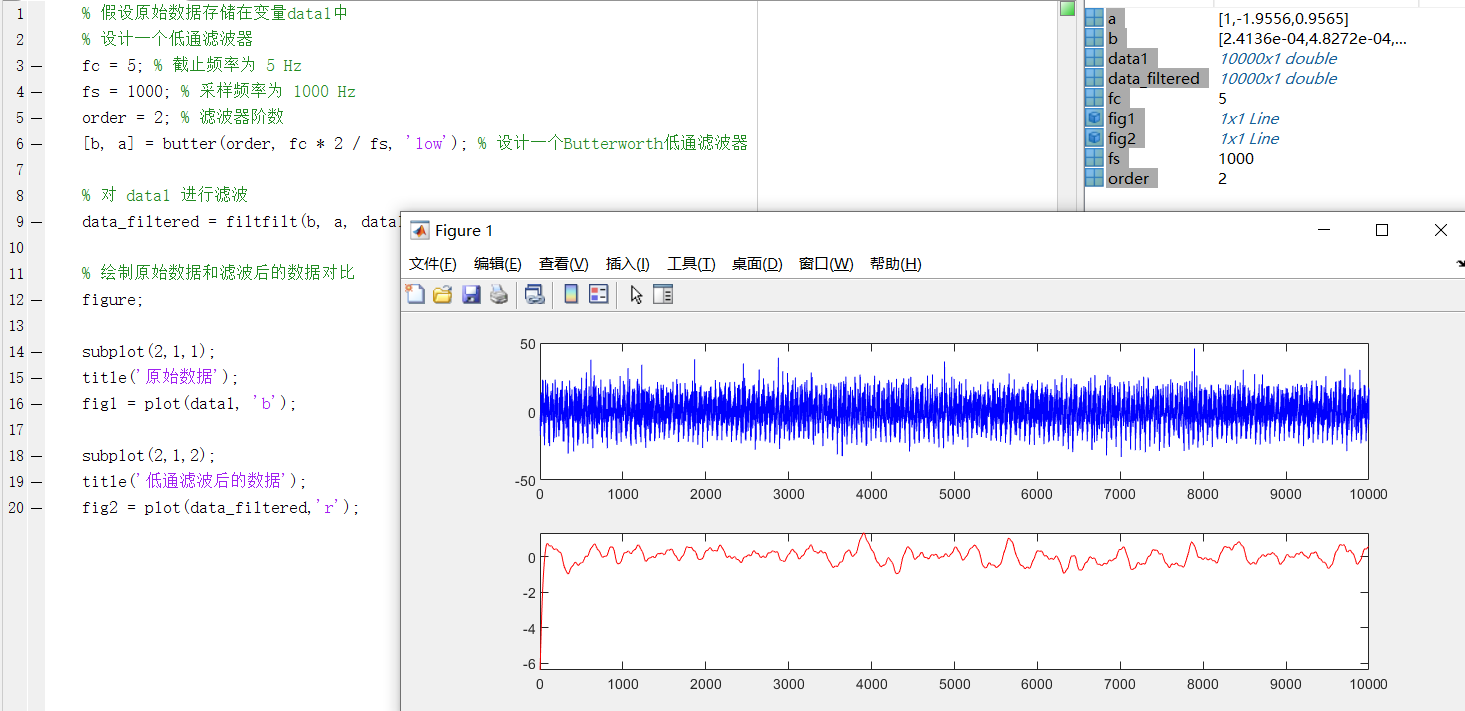
训练PID参数达到合适滤波效果
假设如图已经达到预期效果获取PID参数、滤波器系数、计算周期,同时将Simulink的PID输入输出导出到Matlab.csv
编写测试demo程序
准备好matlab.csv数据,编写C语言使用Matlab的PID系数创建PID,并按照Matlab的PID输入计算一遍比较输出结果
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
/* 读取data.csv文件数据*/
void readData(const char *filename, float *data1, float *data2, float *data3, int len)
{
FILE *fp = fopen(filename, "r");
if (fp == NULL)
{
printf("Failed to open file %s\n", filename);
return;
}
for (int i = 0; i < len; i++)
{
fscanf(fp, "%f,%f,%f", &data1[i], &data2[i], &data3[i]);
}
fclose(fp);
}
int main(void)
{
/* 读取数据 */
const int len = 10000;
float pid_out[len], matlab_pid_input[len], matlab_pid_output[len], matlab_sfun_output[len];
readData("matlab.csv", matlab_pid_input, matlab_pid_output, matlab_sfun_output, len);
/* 计算PID */
pid_t pid_handle;
pid_init(&pid_handle, KP, KI, KD, FILTER_PARA, CYCLE_TIME);
for(int i = 0; i < len; i++)
{
pid_out[i] = pid_calc(&pid_handle, matlab_pid_input[i], matlab_sfun_output[i]);
}
/* 保存数据到output.csv */
FILE *fp = fopen("output.csv", "w");
if (fp == NULL)
{
printf("Failed to open file output.csv\n");
return 0;
}
/* 将所有数据写入 */
for (int i = 0; i < len; i++)
{
fprintf(fp, "%f,%f\n", pid_out[i], matlab_pid_output[i]);
}
fclose(fp);
return 0;
}
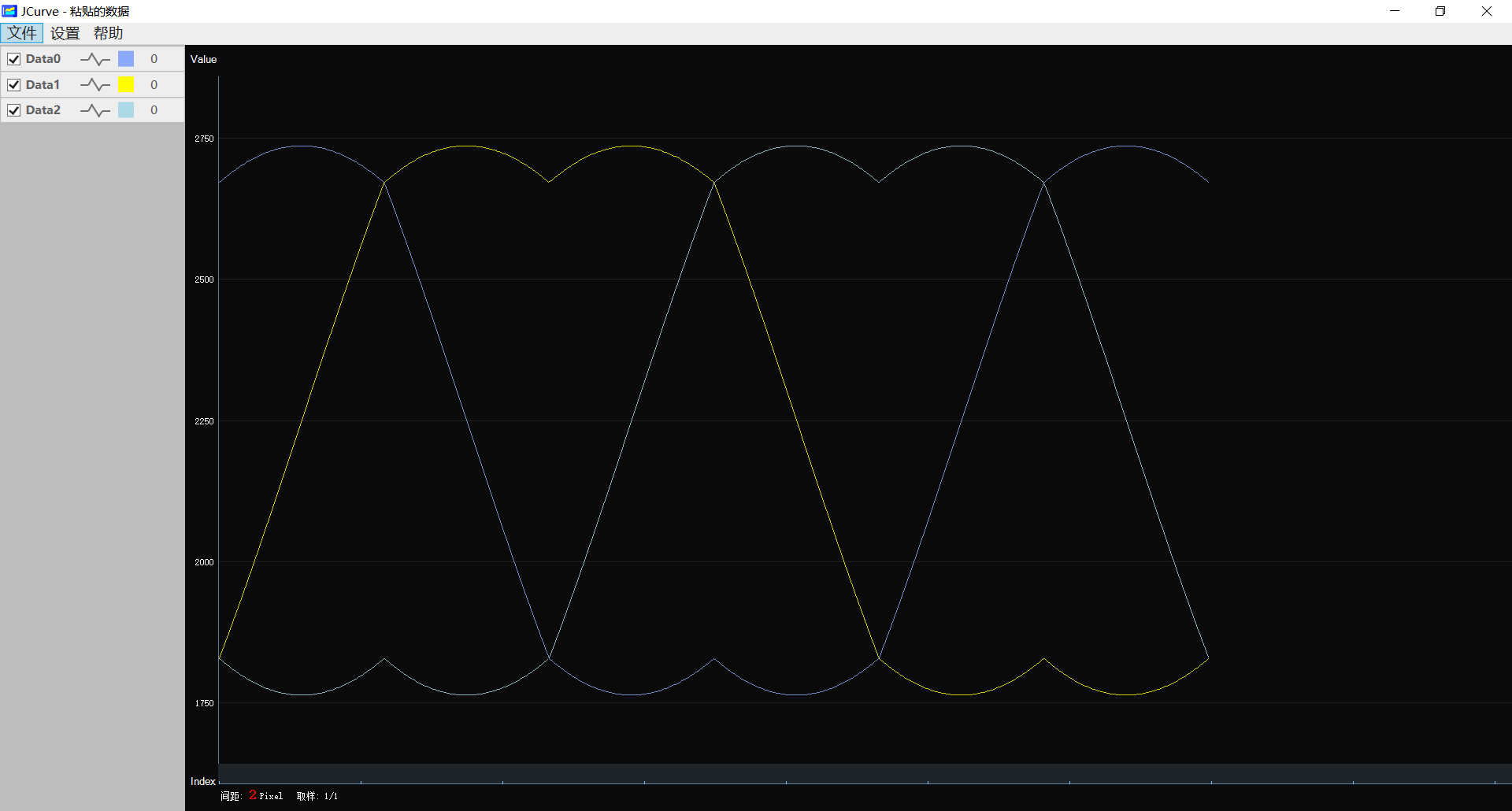
运行demo,可视化结果
[^Matlab的PID计算结果-C语言PID计算结果 ]: 结果完全一致

开源地址
相关推荐

评论